Mi primer programa: movimientos básicos de Masaylo¶
Objetivos de la práctica¶
Muy bien. Ya hemos instalado nuestra aplicación, hemos instalado nuestras librerías y archivos de características de microcontroladores y estamos preparados para realizar nuestra primera prueba práctica. Para ello, vamos a programar a nuestro Masaylo para que haga una única vez (ya explicamos en la sección Primeros pasos cómo introducir un punto de interrupción de programa con la tecla "Fin") la siguiente secuencia de movimientos:
- Moverse hacia adelante durante 3 segundos.
- Girar hacia la izquierda 0.5 segundos.
- Mover hacia adelante otros 3 segundos.
- Girar hacia la derecha durante 0.5 segundos.
- Ir hacia atrás 3 segundos.
- Girar hacia la izquierda durante 1 segundo.
- Paro. Fin del programa.
Creación del programa en MasayloBlockly¶
Todas las piezas que vamos a utilizar las obtendremos de los siguientes bloques de opciones:
 para todos los comandos de movimiento del robot
para todos los comandos de movimiento del robot (como es obvio) para los comandos de espera
(como es obvio) para los comandos de espera (en modo primerizo si utilizamos el icono de preferencias del menú principal) para insertar la pieza "Fin" que introducirá el punto de interrupción del programa.
(en modo primerizo si utilizamos el icono de preferencias del menú principal) para insertar la pieza "Fin" que introducirá el punto de interrupción del programa.
Inicialización de un robot en Arduino¶
Por norma, todos los programas referidos a robots en Arduino y derivados implican el uso de librerías especializadas inspiradas en la filosofía de la programación orientada a objetos (POO) que exigen, al principio del programa, que se declare e inicialize un objeto de la clase que integra las características del robot referido. En todos los casos, la pieza referida a la inicialización del robot estará siempre al principio del desplegable de cada bloque de opciones:
| Icono | Función |
|---|---|
 | Inicializar un Escornabot |
 | Inicializar un OttoDIY |
 | Inicializar un Otto Humanoide |
 | Inicializar un robot Masaylo estándar |
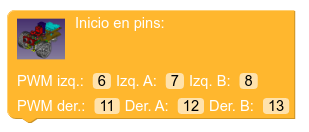 | Inicializar un Masaylo que no lleva las conexiones por defecto que se aconsejan en la documentación (esto es, está personalizado) |
Programa: movimientos básicos¶
Procedemos, pues, a crear nuestro programa con el objetivo de lograr los objetivos estipulados. Por esta vez, no nos pararemos a matizar la velocidad a la que queremos hacer cada movimiento (para lo que, obviamente, también disponemos del correspondiente comando en formato gráfico) y nos limitaremos a crear el siguiente programa (Nota: este programa está disponible en el botón de Ejemplos del menú principal, con el el título "Aprende a controlar los movimientos básicos del robot Masaylo").
| Mi primer programa: movimientos básicos |
|---|
 |