Ultrasonidos y Masaylo¶
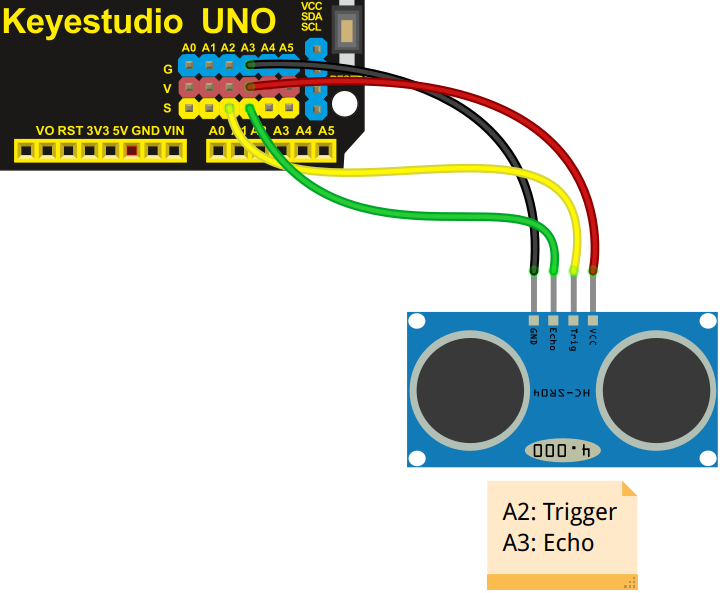
Masaylo incorpora un sensor de ultrasonidos en su parte delantera, que nos servirá para medir distancias a los objetos que pueda encontrar en su camino.
| Sensor de Ultrasonidos |
|---|
 |
Las órdenes que tenemos para controlar el sensor de ultrasonidos son:
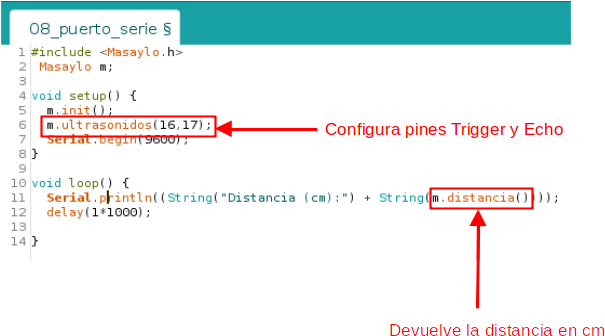
- objetoMasaylo.ultrasonidos (pinTrigger,pinEcho): Configura los pines trigger y echo del sensor de ultrasonidos. Si no pasas parámetros objetoMasaylo.ultrasonidos(), pone los valores objetoMasaylo.ultrasonidos(16,17), de esta forma el pin del Trigger es el 16 (A2), y el pin del Echo es el 17 (A3), esta instrucción debe estar en el setup de nuestro programa. En nuestro caso del ejemplo m.ultrasonidos (16,17).
- objetoMasaylo.distancia (): Nos devuelve la distancia en cm entre el sensor de ultrasonidos y el objeto que tenga enfrentado. En nuestro caso del ejemplo m.distancia().
En el ejemplo que presentamos a continuación (ejemplo 8 de la librería), se configura el sensor de ultrasonidos, para mostrar por el puerto serie la distancia a la que se encuentra un objeto enfrentado al robot masaylo.
| Uso de ultrasonidos |
|---|
 |