Servomotores y Masaylo¶
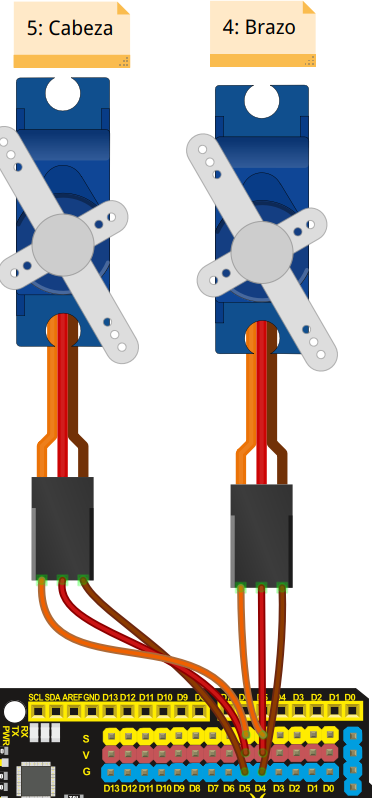
Masaylo incorpora dos servomotores, uno que nos sirve para girar el sensor de ultrasonidos situado en la zona delantera del robot, y otro para girar el brazo que sirve para capturar objetos. Los servomotores que presenta Masaylo son los microservos SG-90 que permiten un giro entre 0º y 179º.
| Servomotores |
|---|
 |
Las órdenes que tenemos para controlar los servomotores son:
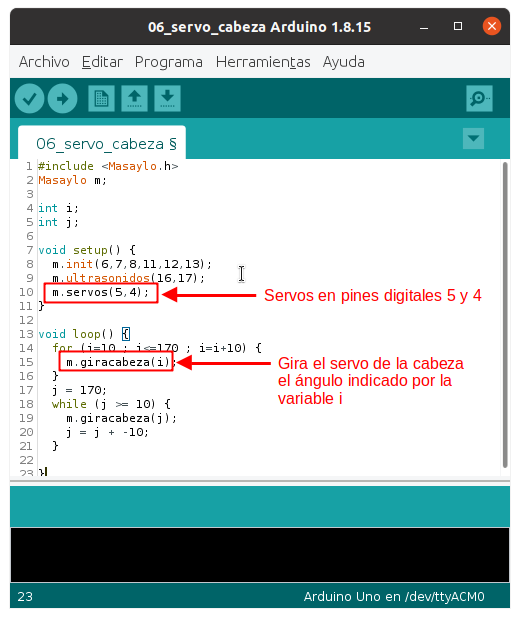
- objetoMasaylo.servos (pin servocabeza, pin servobrazo): Configura los pines de los servos de la cabeza y del brazo respectivamente. Si no pasas parámetros objetoMasaylo.servos(), pone los valores objetoMasaylo.servos(5,4), por tanto el servo de la cabeza (ultrasonidos) es asignado al pin digital 5 y el servo del brazo al pin digital 4, esta instrucción debe estar en el setup de nuestro programa. En el ejemplo m.servos(5,4).
- objetoMasaylo.giracabeza (grados): Gira el servo de la cabeza un ángulo dado entre 0º y 179º. En el ejemplo m.giracabeza (i), siendo i una variable en este caso.
- objetoMasaylo.girabrazo (grados): Gira el servo del brazo un ángulo dado entre 0º y 179º.
En el ejemplo que presentamos a continuación (ejemplo 6 de la librería) se configura los pines de los servomotores, para posteriormente producir un movimiento giratorio alternativo del sensor de ultrasonidos, moviéndolo con un microservo de 10º a 170º y de 170º a 10º.
| Control de servomotores |
|---|
 |