Controlar motores de Masaylo¶
| Motores |
|---|
 |
Para el control de los dos motores de corriente contínua que mueven a Masaylo, lo primero que debemos hacer es crear un objeto tipo robot Masaylo, para ello pondremos la línea antes de void setup(), Masaylo objetoMasaylo, en nuestro caso Masaylo m (nuestro robot Masaylo se llama m).
| Crear objeto Masaylo |
|---|
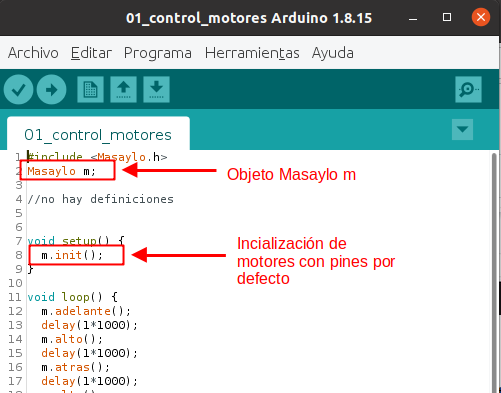 |
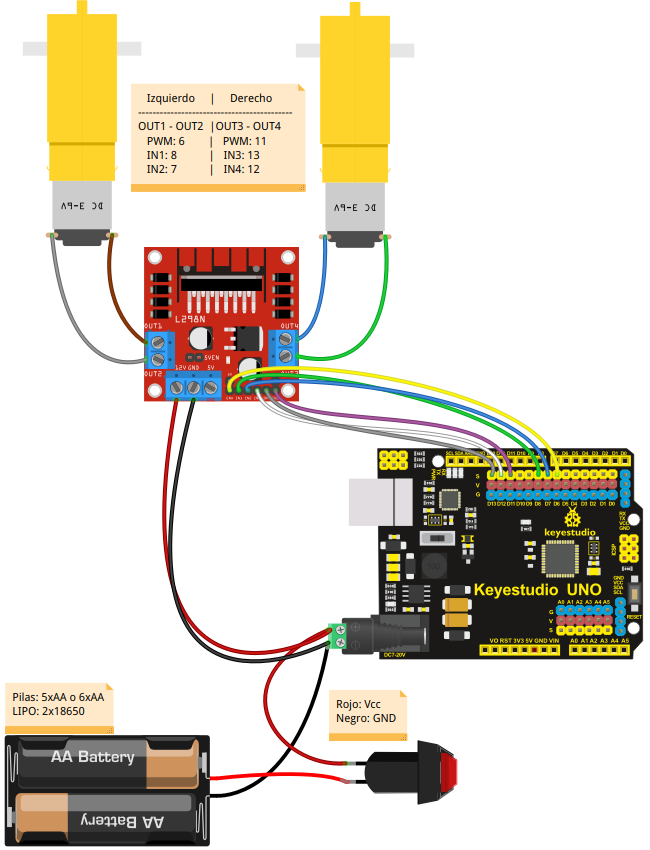
En la función setup(), ya sabéis que se ejecuta una sola vez, vamos a definir los pines de los motores, lo que se puede hacer de dos maneras:
- Sin pasar parámetros (sin colocar nada entre los paréntesis), objetoMasaylo.init(), en nuestro caso de ejemplo m.init(): con esta orden indicamos que los pines de los motores son los que trae por defecto objetoMasaylo.init(6,7,8,11,12,13), siendo el orden de los pines definidos de izquierda a derecha, pin de control de velocidad de giro (PWM) del motor izquierdo, pin A del motor izquierdo, pin B del motor izquierdo, pin de control de velocidad de giro (PWM) del motor derecho, pin A del motor derecho, pin B del motor derecho.
- Pasando parámetros de pines (colocándolos entre paréntesis), objetoMasaylo.init (pinPWMMotorIzdo,pinAMotorIzdo,pinBMotorIzdo,pinPWMMotorDcho,pinAMotorDcho,pinBMotorDcho), de esta manera podríamos conectar nuestros motores a los pines que deseemos, un ejemplo podría ser m.init(6,7,8,11,12,13).
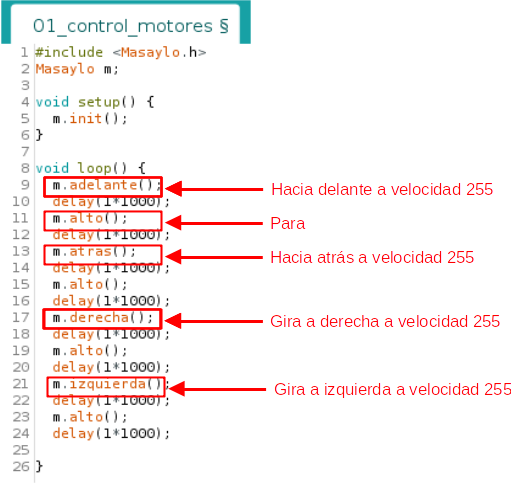
Pasamos a explicar las instrucciones para mover el robot:
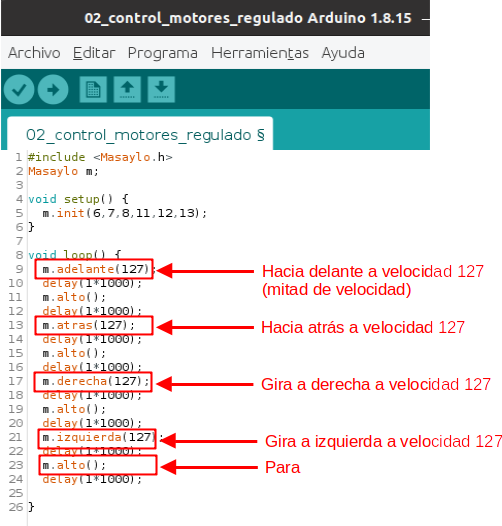
- objetoMasaylo.adelante (velocidad): Mueve el robot Masaylo hacia delante, le podemos pasar el valor de la velocidad a la que lo hace (entre 0 y 255), si no pasamos valor, paréntesis sin valor, lo hace a 255. En nuestro caso del ejemplo m.adelante().
- objetoMasaylo.atras (velocidad): Mueve el robot Masaylo hacia atrás, le podemos pasar el valor de la velocidad a la que lo hace (entre 0 y 255), si no pasamos valor, paréntesis sin valor, lo hace a 255. En nuestro caso del ejemplo m.atras().
- objetoMasaylo.izquierda (velocidad): Gira (pivota) el robot Masaylo hacia la izquierda, le podemos pasar el valor de la velocidad a la que lo hace (entre 0 y 255), si no pasamos valor, paréntesis sin valor, lo hace a 255. En nuestro caso del ejemplo m.izquierda().
- objetoMasaylo.derecha (velocidad): Gira (pivota) el robot Masaylo hacia la derecha, le podemos pasar el valor de la velocidad a la que lo hace (entre 0 y 255), si no pasamos valor, paréntesis sin valor, lo hace a 255. En nuestro caso del ejemplo m.derecha().
- objetoMasaylo.alto (): Para el robot Masaylo. En nuestro caso del ejemplo m.alto().
A continuación vemos estas órdenes reflejadas en el ejemplo 01 de la librería:
| Ejemplo 01 de la librería |
|---|
 |
En el ejemplo 02 vemos como se pasan valores de velocidad a los movimientos de nuestro robot:
| Ejemplo 02 de la librería |
|---|
 |