Infrarrojos y Masaylo¶
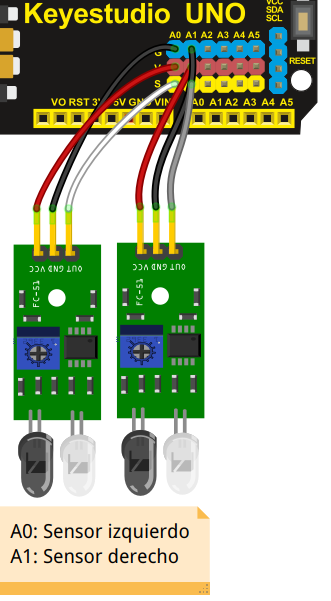
Masaylo incorpora dos sensores de infrarrojos alojados en sendos portasensores en la parte delantera cercanos al suelo, el objeto de los mismos es detectar reflexión o no de luz infrarroja sobre una superficie, pudiendo distinguir entre superficies que reflejan (blanco) y otras que no lo hacen (negro).
| Infrarrojos |
|---|
 |
Las órdenes que tenemos para controlar los sensores de infrarrojos son las siguientes:
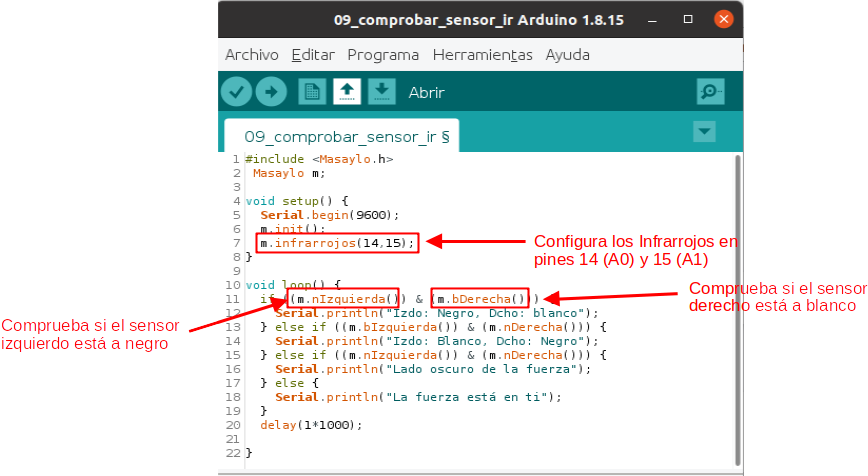
- objetoMasaylo.infrarrojos (pinIzdoIr,pinDchoIr): Configura los pines de los sensores infrarrojos de suelo del robot. Si no pasas parámetros objetoMasaylo.infrarrojos(), pone los valores objetoMasaylo.infrarrojos(14,15), asociando el sensor izquierdo al pin 14 (A0), y el derecho al pin 15 (A1), esta instrucción debe estar en el setup de nuetro programa. En nuestro caso del ejemplo m.infrarrojos (14,15).
- objetoMasaylo.nIzquierda (): Nos devuelve "true" si el sensor de infrarrojos izquierdo está a negro y "false" si no lo está. En nuestro ejemplo m.nIzquierda().
- objetoMasaylo.nDerecha (): Nos devuelve "true" si el sensor de infrarrojos derecho está a negro y "false" si no lo está. En nuestro ejemplo m.nDerecha().
- objetoMasaylo.bIzquierda (): Nos devuelve "true" si el sensor de infrarrojos izquierdo está a blanco y "false" si no lo está. En nuestro ejemplo m.bIzquierda().
- objetoMasaylo.bDerecha (): Nos devuelve "true" si el sensor de infrarrojos derecho está a blanco y "false" si no lo está. En nuestro ejemplo m.bDerecha().
En el ejemplo que presentamos a continuación (ejemplo 9 de la librería), se configura el sensor de infrarrojos, y posteriormente, con varios condicionales, se comprueba todas las combinaciones posibles de estados de blanco y negro de los sensores, para mostrar el estado actual de los mismos en la pantalla del ordenador a través de comunicación serie.
| Uso de infrarrojos |
|---|
 |